Motors with Gears: Design Considerations for Compact Power Solutions


You depend on gear motors when you need a compact size and strong solution for your project. Motors with gears help you get more power in less space. A well-planned design lets you boost torque and control speed. You must match the motor and gear motors to your application for the best solution. With the right motor, gear motors deliver the size, reliability, and solutions you need.
Key Takeaways
Gearmotors put a motor and gearbox together. They give strong power in a small space. This helps control torque and speed in many uses.
Pick the right gearmotor type for your needs. Spur, planetary, or worm types work for different things. Think about size, noise, force, and self-locking when you choose.
Match torque, speed, and gear ratio to your project. This helps the gearmotor work well and last a long time.
Think about size, weight, mounting, efficiency, and noise. These things help you balance power and make your gearmotor small.
Use a clear process to pick your gearmotor. First, know what you need. Next, figure out the gear ratio. Then, match the motor and gearbox. Last, test and change things to get the best result.
Motors with Gears in Compact Design
What Is a Gearmotor?
A gearmotor is a motor and gearbox in one small unit. It helps you control speed and torque better than a regular motor. The gearbox connects right to the motor shaft. It changes how fast the shaft spins and makes the output stronger. Gear motors are used when you need something small and dependable. The table below lists gear types and what they do:
Gear Type | Description | Advantages | Disadvantages |
|---|---|---|---|
Spur Gears | Straight teeth, parallel shafts | Cheap, small, good for high ratios | Loud, can wear out |
Planetary Gears | Many gears, shares the load | Strong, small, works well | Harder to fix, more parts |
Worm Gearing | Right-angle, big reduction | Quiet, accurate, needs little care | Not very efficient, can't go backward |
Bevel Gears | Axes cross, teeth at an angle | Tough, works at right angles | Needs strong support, can shake |
Why Use Motors with Gears?
Motors with gears give you more force and better control in less space. Gearmotors slow down the motor but make it stronger. This is good for jobs that need power, not speed. Gear motors work best when you need slow speed and lots of force. Regular motors lose power if you try to do this. Using gear motors saves energy and helps your machine last longer. Here are some new trends:
Mini electric motors are strong and small, great for drones and medical tools.
Brushless DC gear motors are quiet, last long, and are very reliable.
Custom gearmotors fit into tight or odd spaces, so you can design what you want.
Bevel gear motors made $1.4 billion in 2024, showing people want small, strong motors.
Typical Applications
Gearmotors are used in many fields. They run conveyor belts, robot arms, and medical machines. In robots, a geared motor helps you move things just right. Gear motors help lift and move heavy stuff in factories. Smart factories and robots need small, strong gear motors more than ever. You also find gear motors in drones, smart devices, and cars. A robot motor with a gearmotor lets you make smaller, stronger machines.
Main Types of Gearmotor

When you pick a gearmotor for a small space, you should know the main types. Each gearhead type has special benefits for different jobs. Here are the three most common gear motors used today.
Spur Gearmotor
A spur gearmotor has straight teeth on gears that line up. This gearhead is simple and works well. Spur gear motors are good when you want medium force and fast speed. They are easy to take care of and do not cost much. But they can be loud and do not work as well with high force at slow speeds.
Tip: Pick a spur gearmotor if you want a simple and steady choice for things like conveyor belts or vending machines.
Spur gear motors do not lock by themselves, so do not use them if you need the motor to hold still without power. Spur gearheads are bigger than planetary gear motors, but they are still very good for many uses.
Planetary Gearmotor
A planetary gearmotor is small and gives strong force. It has many gears that spin around a center gear. This helps share the work and makes the gear last longer. Planetary gear motors are quiet and last a long time. They are great for robots, electric valves, and places where you need lots of power in a small spot.
Parameter | Benefit/Statistic |
|---|---|
Transmission Efficiency | Up to 97% (single-stage), above 90% (multi-stage) |
Space & Weight Savings | Up to 60% compared to other gear motors |
Durability | 2–3 times longer life than parallel-axis gearheads |
Noise Reduction | 10–15 dB lower than spur gear motors |
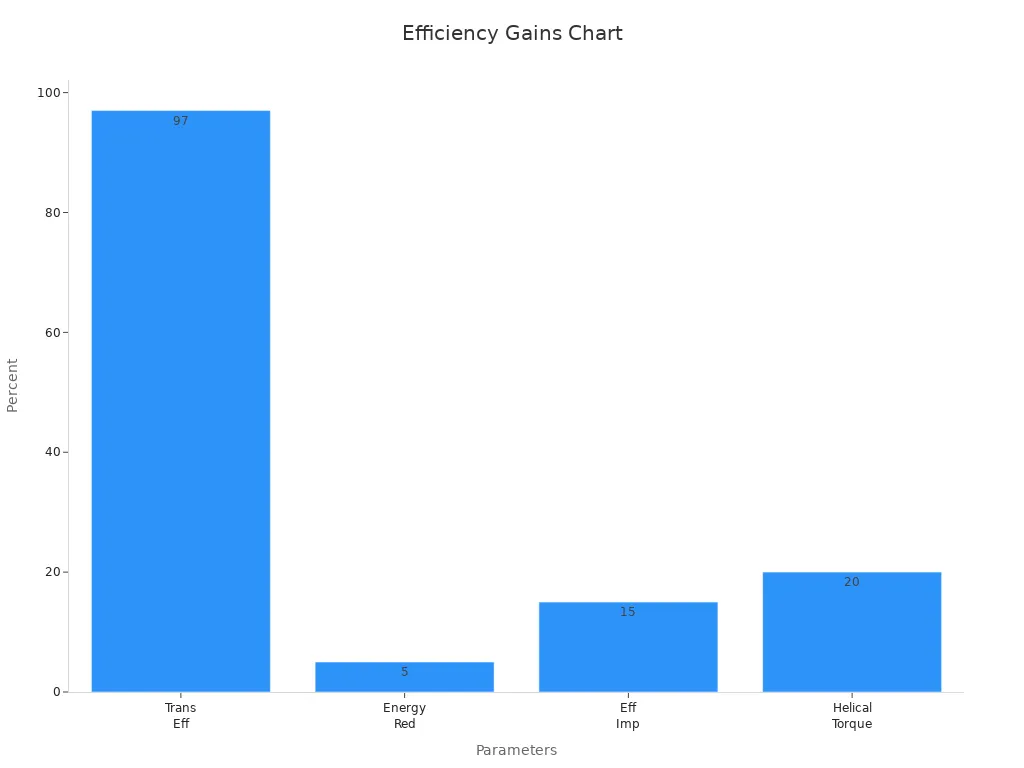
Use a planetary gear motor if you need strong force, good efficiency, and a small size. This gearhead also makes less noise and shakes less, so it is good for quiet places.
Worm Gearmotor
A worm gearmotor uses a screw and a wheel to make a lot of force in a small space. It gives strong force at slow speeds and can lock itself, so the shaft does not move when the motor is off. This makes worm gear motors good for elevators, security systems, and tight conveyor belts.
Worm gearheads are quiet and do not shake much.
They last a long time and can save up to 30% on fixing costs in small spaces.
The self-locking part keeps your machines safe and steady.
Pick a worm gearmotor if you want safe holding, smooth running, and strong force in a small spot. Check the oil and watch for shaking to keep your gear motors working well for a long time.
Design Considerations
When you pick a gearmotor for a small system, you need to think about a few things. These things help your gearmotor work well and last longer. You want your gearmotor to fit your job and keep working for a long time.
Torque and Speed
You have to match the torque and speed to your job. Torque is the force from the motor shaft. If your gearmotor has low torque, your machine might stop. If it has too much, you waste space and power. Most gearmotors have a torque-speed curve. This curve shows how the motor works with different loads.
First, check the starting area. You get high torque at low speed here. This helps start heavy things.
Next, look at the steady area. The gearmotor runs smooth here. Speed drops a little as the load gets bigger.
Stay away from the stalling area. Too much load can slow or break the motor.
Use the constant torque area for jobs that need strong force from zero to base speed.
In the field weakening area, torque goes down but power stays high. This lets you run faster.
Tip: Always use the steady torque-speed area for best life and reliability.
You should check speed, torque, power, and current to balance torque and speed. The gear ratio also changes this balance. A high gear ratio gives more torque but less speed. A low ratio gives more speed but less torque. Conveyor belts and robot arms work best in the steady torque-speed area.
Gear Ratio
Gear ratio means how many times the input shaft turns for each output shaft turn. This changes the torque and speed. If you need more torque, pick a higher gear ratio. This makes the shaft stronger but slower. If you want more speed, use a lower gear ratio.
Gear Type | Transmission Ratio Range | Efficiency Characteristics |
|---|---|---|
Planetary Gears | 3 to 50 | Efficiency drops above ratio 10 due to more stages |
Strain Wave Drives | 30 to 180 | Efficiency drops beyond ratio 100 |
Cycloidal Drives | Variable | High efficiency across many ratios |
Note: Gear reduction gives more torque and less speed. Always check how efficient your gear type is at your chosen ratio.
Size and Weight
You want your gearmotor to be small and light but still strong. Small gearmotors save space and are easy to use. New designs let you put a planetary gearbox inside the stator. This makes the gearmotor lighter and stronger. For example, a powered knee brace used a custom BLDC motor and planetary gearbox. It weighed only 1.15 kg.
Putting the gearbox and motor together also makes it smaller and lighter. This helps power and efficiency. New materials and smart sensors make gearmotors even smaller and better.
Remember: The diameter of the gearmotor changes torque and inertia more than length. Pick your design features carefully for the best results.
Mounting Orientation
How you put your gearmotor in place changes how well it works. Some gearmotors work in any position. Others need special care. New designs, like the EVOX geared motor, use smart oiling. You can mount them any way you want. You do not need to change oil or plugs. This makes your system easier to use and fix.
You should also check for problems early. Some gearmotors have sensors to find faults. This helps you fix issues before they get worse.
Efficiency and Noise
Efficiency shows how much power your gearmotor uses for work. High efficiency means less heat and lower bills. Noise matters too, especially in quiet places like hospitals.
Gear Type | Efficiency Range | Noise Characteristics | Trade-offs and Notes |
|---|---|---|---|
Planetary Gears | 85-95% per stage | Usually quiet, but louder at high speeds | High efficiency, complex design, higher cost |
Helical Gears | Typically high | Low noise because of angled teeth | Quieter, but more complex and costly |
Worm Gears | As low as 50% | Quieter than planetary at high ratios | Lower efficiency, self-locking, good for quiet places |
Helical planetary gearboxes can be up to 98% efficient and run quietly. Worm gearboxes are quieter but not as efficient. You must balance noise, efficiency, cost, and what you need. High gear ratios give more torque but can lower efficiency and make more noise. Always check your gears and oil to keep noise and wear low.
Pro Tip: Pick the gearmotor that gives you the best mix of efficiency, noise, and strong force for your job.
Other Practical Factors
Shock load: Make sure your gearmotor can handle sudden hits.
Duty cycle: Pick a motor that matches how often you use it.
Environmental conditions: Choose parts that protect against dust, water, or chemicals.
Maintenance: Pick gearmotors that are easy to check and fix.
Think about the load your gearmotor will face early in your design. Use load calculations to avoid making it too strong and wasting resources. Test your system to find damage and make it better before building. Tooth contact checks and dynamic tests help you find and fix gear and system problems.
Note: Careful design and control, like using Monte Carlo tests, help you get the best torque and reliability from your gearmotor.
Motor and Gearbox Selection Guide
Define Requirements
Begin by figuring out what your project needs. You need to know the load, speed, and output torque for your system. Make a requirement matrix to keep these needs organized. This matrix helps you compare choices and makes sure you do not forget anything important.
Write down the weight or force your machine will move.
List the speed you want at the output shaft.
Note how often and how long the gearmotor will run.
Think about the environment: Will your gearhead face dust, water, or chemicals?
Decide how reliable you want your system to be. Standards like ANSI/AGMA 2101 and ISO 6336 use reliability factors to set quality levels. Most designs use a 1% failure chance as a starting point.
Think about safety margins. Use statistics to adjust for things you cannot predict and make sure your gearmotor meets your quality goals.
Tip: A clear requirement matrix makes picking a motor and gearbox much easier and helps you avoid expensive mistakes.
Calculate Gear Ratio
Now, figure out the gear ratio you need. The gear ratio connects the speed of your motor to the speed and torque at the output. You can use a simple formula:
Gear Ratio = Number of Teeth on Driven Gear / Number of Teeth on Drive Gear
For example, if your drive gear has 21 teeth and your driven gear has 28 teeth, the gear ratio is 28/21, or about 1.33:1. This means the output shaft turns slower but with more torque.
Higher gear ratios give you more output torque but less speed.
Lower gear ratios give you more speed but less torque.
In small designs, you must balance the gear ratio to get enough power without making the gearhead too big or noisy.
Contact ratio is also important. It affects how smooth your gearhead runs and how much noise it makes. For small gearboxes, use math tools or engineering software to check stress, backlash, and how long the gears will last. This helps you avoid problems and makes sure your gearmotor lasts longer.
Match Motor and Gearbox
Next, match your motor and gearbox to your needs. Check motor datasheets for speed, torque, and efficiency. Look at the gearhead’s strength, yield limits, and how much heat it can handle. Make sure the motor and gearbox work together without overloading either one.
Validation Test / Data Type | Description | Purpose in Verification |
|---|---|---|
Measures power lost in gearbox with no load, focusing on oil movement and losses not caused by load. | Checks gearbox losses and efficiency in controlled tests, making sure motor load expectations are correct. | |
Oil Dynamics and Churning Loss | Measures power lost from oil moving inside gearbox using tests and computer models. | Makes sure the oil’s effect on gearbox and motor load is shown correctly. |
Velocity Profile Comparison (PIV) | Uses special cameras to see how fast oil moves inside gearbox, compared to computer models. | Checks if the model predicts oil flow well, helping motor-gearbox teamwork. |
Aeration Assessment (Bubble Imaging) | Shows air bubbles in gearbox oil with lasers, compared to computer models. | Checks how bubbles affect gearbox efficiency and motor load. |
Integrated Losses (Churning Loss) | Measures average power lost over time in tests and models. | Gives a full check of gearbox losses that affect motor torque and efficiency. |
You should also check how the motor and gearbox fit together. Make sure they line up and seal well. For best results, test your gearmotor in real life. This helps you find problems like overheating or strange noises before you use the system.
Note: Many engineers pick a pre-made gearmotor. This saves time and lowers risk because the maker has already tested the motor and gearbox for quality and reliability.
Example Selection Process
Follow these steps to pick and use a gearmotor for your small design:
List Application Needs
Write down the load, speed, duty cycle, and environment. For example, you need to lift a 10 kg load at 30 RPM for 10 minutes every hour in a dusty place.Calculate Output Torque
Use this formula:Output Torque (Nm) = (Load (kg) × 9.81 × Radius (m)) / Gear EfficiencyIf your load is 10 kg, radius is 0.05 m, and gear efficiency is 0.75:
Output Torque = (10 × 9.81 × 0.05) / 0.75 ≈ 6.54 NmChoose a Motor
Find a motor that gives the speed and torque you need. Check the datasheet for speed, current, and power. Make sure the current does not go over your circuit limits.Choose a Gearbox
Figure out the gear ratio needed to match your motor speed to the output speed you want. For example, if your motor runs at 3000 RPM and you want 30 RPM at the output:Gear Ratio = 3000 / 30 = 100:1Pick a gearhead that can handle the output torque and fits your space.
Check Quality and Reliability
Look at the gearhead’s strength and heat limits. Use reliability factors from standards to set your safety margin. Make sure the gearmotor meets your quality goals.Test and Validate
Run your gearmotor in real conditions. Measure temperature, noise, and power use. Change your design if needed to balance size, power, and reliability.Iterate as Needed
If you find problems, try different motors, gearboxes, or gear ratios. Use engineering tools and product selectors from trusted brands to improve your choice.
🛠️ Pro Tip: Many companies, like Bison Ametek and Groschopp, have case studies and videos that show how to pick and use a gearmotor. These resources help you see real examples and learn the best ways to design small systems.
By following these steps, you can get good at picking a motor, picking a gearbox, and choosing the right gearmotor for your small power solution. Always focus on quality, reliability, and what your project needs.
Common Challenges in Gearmotor Design
Power vs. Size Trade-Offs
When you design gearmotors, you must choose between power and size. If you want more power, you often need a bigger motor or gearbox. This makes your system heavier and takes up more space. For example, stepper motors are simple and cheap, but they need to be bigger to give the same power as a brushless motor. Brushless motors are smaller, but they cost more and need special controls. DC-brush gearmotors with planetary gearheads are a good middle choice for size, price, and control. If you make the motor stronger, you might also need bigger belts, pulleys, or shafts. This can make your design less compact. Always check safety and system losses to keep your gearmotor working well without making it too big.
Making the motor stronger usually means a bigger system.
Motors with more poles are heavier and may need bigger parts.
Drivetrain parts can limit how much power you use.
Heat and Efficiency Losses
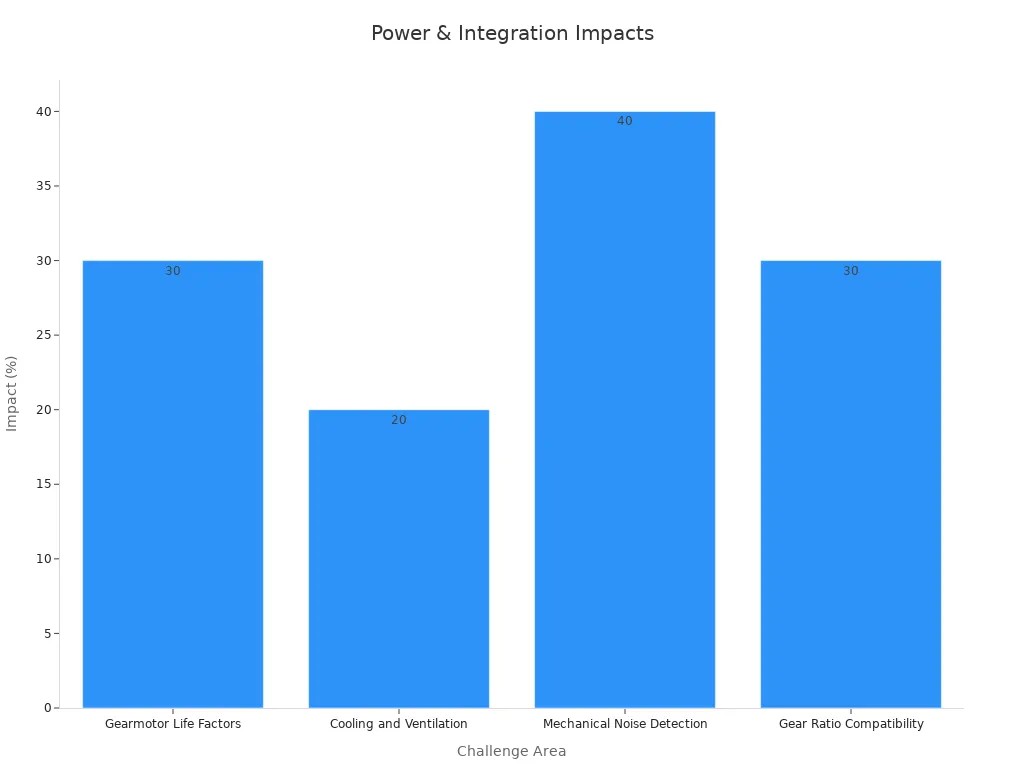
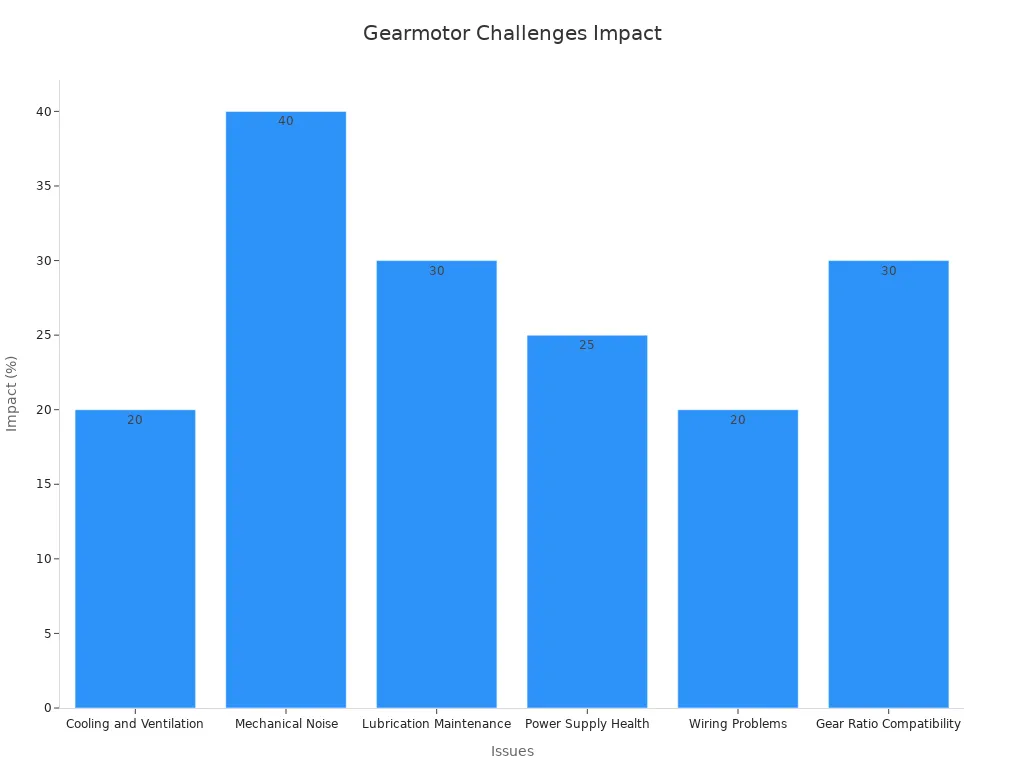
Heat and lost energy can make gearmotors work worse. When motors run faster, they lose more power and get hotter. For example, if you raise the speed from 2104 rpm to 5259 rpm, you can lose over 2000 W and the temperature can go up by more than 50°C. Good cooling and airflow can make gearmotors work up to 20% better. You should watch for heat and use the right oil to keep things running well. If you find noise or shaking early, you can stop over 40% of failures. Always make sure your gear ratio is right, because the wrong one can lower torque by up to 30%.
Issue | Description | Quantitative Impact |
|---|---|---|
Cooling and Ventilation | Stops overheating and helps gearmotors work better | Makes efficiency better by 20% |
Lubrication Maintenance | Lowers rubbing and helps gearmotors last longer | Makes gearmotors last 30% longer |
Mechanical Noise | Finding problems early stops big failures | Stops over 40% of failures |
Cost and Integration
You need to think about both cost and how parts fit together. Using computer models and 3D designs can make design time shorter by up to 75%. Life Cycle Cost (LCC) checks all costs, from buying to throwing away. Putting electronics and mechanics together helps teams work better and makes fewer mistakes. Picking between ready-made gearmotors and custom ones changes both cost and control. Custom gearmotors give you more control, but you need to design more. Always try to improve, like using tools to guess noise, so you can make better gearmotors and save money.
Tip: Always use LCC and computer tools to make your gearmotor work better, use less energy, and cost less.
You can get strong and small power by using a simple plan. First, figure out what you need for your project. Next, pick a motor and gearbox that fit your needs. Always make sure they work well together and do the job right. If you use motors and drives from one company, it is easier to put them together. You also get better help and steady results.
More than 1 million gearmotors are used around the world. This shows they work well and last a long time.
Buying systems together can help you save money and time.
Talk to good suppliers to find the best choice for your project.
FAQ
What is the best way to size a gearmotor for my project?
First, write down your load, speed, and torque needs. Use the formulas in this guide to find the right gear ratio. Always look at the datasheet for each motor and gearbox before buying.
How do I reduce noise in my gearmotor system?
Pick gear types that are quiet, like helical or planetary gears. Keep your gearmotor oiled or greased. Test your system where it will be used to find and fix noise problems early.
Can I use a gearmotor in wet or dusty environments?
Yes, you can use gearmotors in these places. Pick gearmotors with good seals and high protection ratings, like IP65 or higher. Always check what the manufacturer says about where you can use the gearmotor.
How often should I maintain my gearmotor?
Check your gearmotor every few months. Look for wear, noise, or if it gets too hot. Change oil or grease when the manufacturer says to. Regular checks help you stop big problems before they start.
What should I do if my gearmotor overheats?
Tip:
Turn off the system right away. Let the gearmotor cool down. Check if air can move around it, if oil is low, or if it is working too hard. Fix these things before you turn it back on to stop damage.
See Also
Selecting The Best Battery Electric Motor Setup For Efficiency
Effective Techniques To Manage Frequency Vibrations In Small Motors
Designing Compact Vibrating Motors For Limited Space Environments
Guide To Selecting Planetary Gear Motors For Accurate Screwdrivers
Comprehensive Overview Of Mini Motors: Uses, Types, And Choices
Get Custom Micro DC Motors from
INEED Motors!
Leading Brand in Vibration Motor Manufacturing Industry
